智能化坚果去壳机结构设计与数字化建模
随着食品加工行业对自动化、智能化设备需求的不断提升,坚果去壳机作为关键加工设备,其结构设计与技术集成正迈向新的发展阶段。本文主要阐述一种智能化坚果去壳机的整体结构设计思路,并涵盖其CAD二维工程图(零件图与装配图)以及Pro/ENGINEER三维建模的关键内容,为同类智能化设备及配件的设计提供参考。
一、 总体结构与工作原理设计
该智能化坚果去壳机采用模块化设计理念,主要由上料模块、输送与分选模块、核心去壳模块、壳仁分离模块、智能控制模块及出料模块构成。其核心创新在于集成了机器视觉识别与负压自适应调节系统。
工作流程如下:混合坚果经振动上料机构均匀送入柔性输送带,通过机器视觉系统(集成于输送模块上方)快速识别坚果类型(如核桃、巴旦木、夏威夷果等)与尺寸。识别信号传输至PLC控制器,控制器随即调节后续工位的参数。坚果进入核心去壳工位,该工位采用多模式可换执行机构,例如对于核桃采用间歇式滚压破碎,对于夏威夷果采用定向剪切开口。执行机构的压力、行程可通过伺服电机与电动推杆精确控制,其设定值由智能控制系统根据视觉识别结果自动匹配最佳工艺数据库。破碎后的混合物进入壳仁分离室,利用仁与壳的比重、尺寸差异,通过多级振动筛分与负压气流吸附实现高效分离。纯净的果仁最终经收集仓输出。整机运行状态、产量、故障信息通过HMI人机界面实时显示与记录。
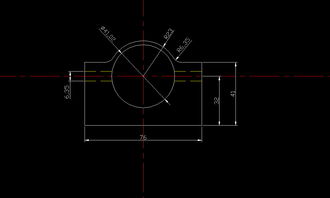
二、 关键部件结构设计与CAD工程图
- 自适应滚压去壳装置:作为核心部件,其设计重点在于两对冲压辊的间隙调节机构。在CAD零件图中,需详细标注驱动辊、从动辊的直径、工作表面硬度处理要求、轴承座安装尺寸以及调节螺杆的螺纹规格。装配图需清晰表达辊间同步齿轮传动、直线导轨滑块调节机构以及压力传感器的安装位置,确保间隙可在0-20mm范围内无极精准调节,公差配合需严格标注。
- 负压壳仁分离器:该部件为钣金焊接结构。CAD图纸需包含分离器腔体、多层倾斜筛网、高压离心风机接口、观察窗等零件的详细展开图与焊接工艺要求。装配图需体现筛网的可拆卸卡扣连接方式与气流导向板的安装角度,确保气流均匀通过筛面,将轻质果壳吸走。
- 机器视觉识别支架:为保障相机与照明系统的稳定性,支架采用铝型材框架结构。零件图需明确型材截面规格、连接角码及相机云台调节座的加工尺寸。装配图应展示相机、环形LED光源与振动上料盘之间的相对位置关系,确保视野覆盖整个输送带宽度。
所有CAD图纸均严格遵循《机械制图国家标准》,包含完整的标题栏、技术要求、材料清单及合理的尺寸、形位公差标注,为后续加工制造提供精确依据。
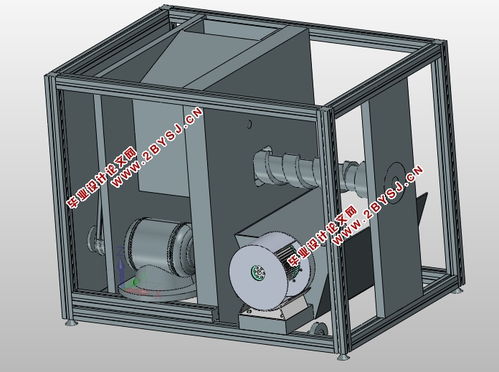
三、 Pro/ENGINEER三维建模与数字化装配
在Pro/ENGINEER(Creo)环境中进行全参数化三维建模,是验证设计合理性与进行运动仿真的关键步骤。
- 零件建模:对每个功能零件,如机架、传动轴、齿轮、气缸安装板等,依据CAD二维设计尺寸进行实体建模。对复杂曲面部件(如送料滑道)可利用扫描、混合等高级特征构建。所有模型均赋予密度、材质等物理属性,为后续有限元分析(如对关键承力部件进行应力分析)奠定基础。
- 数字化装配与运动仿真:将各零件模型按实际约束关系(如对齐、匹配、插入、轴承连接等)进行虚拟装配,生成整机三维总装模型。此过程可直观检查是否存在干涉,例如检查滚压辊在调节过程中是否与机架内侧发生碰撞。利用机构模块对送料连杆机构、筛网振动机构设置驱动电机,进行运动学仿真,验证其运动轨迹与速度是否符合设计要求。
- 智能化模块集成示意:在三维模型中,以简化模型或空间占位符的形式体现PLC控制柜、触摸屏、传感器、气管与线缆桥架的布局,进行初步的电气布线规划,确保结构设计与控制系统硬件安装的协调性。
四、 智能化配件设计要点
- 多传感器融合:设计集成压力、位置、光电接近开关等多种传感器的专用安装支架与信号线保护套管,确保数据采集的可靠性与设备整洁。
- 执行器选型与接口:根据计算出的负载与速度要求,精确选型伺服电机、步进电机及电动推杆,并在结构上设计标准的电机安装板与联轴器防护罩。
- 人机交互界面:控制柜面板布局需符合人机工程学,急停按钮、模式选择开关、指示灯等配件的安装孔位需在机柜零件图上精确标出。
一款先进的智能化坚果去壳机的开发,是精密机械结构、自动化执行机构与智能感知控制系统深度融合的产物。通过严谨的CAD工程图设计与Pro/E三维数字化建模,不仅能准确表达设计意图,指导生产加工,更能通过虚拟仿真提前发现并解决潜在问题,大幅缩短研发周期,提升设备可靠性与智能化水平,为坚果加工产业升级提供高效、清洁的装备解决方案。
最新产品